מאת: חיים זכרמן, מנהל פרויקטים תחום רובוטיקה ואוטומציה בחברת SU-PAD
לאלו שיש ניסיון בתחום, יסכימו איתי אם אגיד שאחד האתגרים בכל אפליקציה רובוטית (ולא משנה באיזו רובוט מדובר) הינו תכנון ובחירת אביזר הקצה או (EOAT (End Of Arm Tooling. הסיבה העיקרית לכך נובעת מהעובדה שישנם תרתי משמע מאות פתרונות "מדף" בשוק מהיצרנים המובילים בעולם כגון Schunk, Gimatic, Zimmer, Robotiq אשר במבט ראשוני נראים כמעט זהים אך בעלי מפרט שונה מאוד. שלא לציין שפעמים רבות נדרש לתכנן פתרון מותאם אישי ללקוח.
באופן כללי, אביזר הקצר הוא רכיב היקפי שמתחבר לפרק כף היד או הציר האחרון של הרובוט, אשר בא במגע עם המוצר ומאפשר לרובוט לבצע את המשימה שלו. מרבית אביזרי הקצה הם מכניים או אלקטרו-מכניים ומשמשים כתפסנים, כלי עיבוד או חישה, המאפשרים לרובוט לבצע משימות של לקיחה והשמה (Pick & Place), טיפול בטיב פני השטח או ביצוע בדיקות ובקרת איכות.
בחירה לא נכונה של אביזר הקצה עלולה לגרום באופן ישיר לכישלון האפליקציה בשטח בלי קשר ליכולות ואיכות הרובוט עצמו. אביזר הקצה הנפוץ ביותר הינו הגריפר (Gripper), המאפשר לרובוט לאחוז ולתפעל מגוון רחב של חלקים ומשימות. לאור פניות מרובות בנושא, החלטתי להכין מדריך קצר, אשר דרכו אנסה להבהיר מספר עקרונות יסוד ולספק את הכלים הדרושים על מנת להעריך נכון ולבחור את הגריפר המתאים ביותר למשימה.
1.החלק שצריך לטפל בו
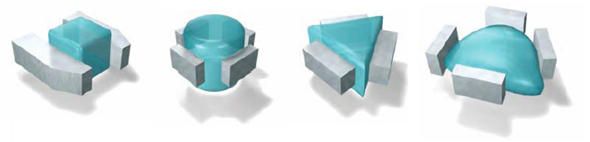
התחילו בקביעת הגיאומטריה של מה שאתם צריכים להרים. אם למוצר יש שני משטחים מנוגדים ומקבילים, נהוג להשתמש בדרך כלל בגריפר עם 2 לסתות (תפסניות).
אם החלק גלילי, רצוי להשתמש באחיזת 3 לסתות. (ניתן לאחוז גם חלקים גליליים בהדירות – חזרתיות גבוהה גם באמצעות 2 לסתות, במידה ובוצע תכנון נכון). גודל החלק ישפיע באופן ישיר על הפתח של האצבעות והמהלך שנדרש לבצע.
בנוסף, ככל שהחלק גדול יותר כך נדרשות יותר אצבעות אחיזה על מנת לחלק את המשקל באופן שווה ולוודא שהחלק לא יחליק תוך כדי תנועה.
לאחר קביעת הצורה, כדאי לשקול גם את הגימור או את המרקם של החלק. האם האחיזה צריכה להיות רכה כדי למנוע שריטות?
יש לקחת בחשבון גם את נוקשות החלק. חלקים עשויי זכוכית לדוגמא, קשים מצד אחד אך פריכים ורגישים למכות. זו אחת הסיבות שפעמים רבות עדיף להשתמש בפטמות וואקום במקום בגריפר בעל אחיזה מכנית.
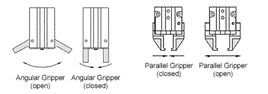
נגישות ועקביות החלקים. גריפרים זוויתיים בדרך כלל זולים יותר מגריפרים מקביליים, אך תנועת הקשת של הלסתות עשויה לדרוש טולרנס נוסף והוא עלול לאחוז את החלק בנקודות שונות ככל שרוחב החלק משתנה. לעומתו, אחיזה מקבילה מאפשרת לפצות ביתר קלות על גודל החלק ולהפעיל כוח לחיצה גדול יותר.
פעמים רבות מומלץ לדמות את פעולת הגריפר על ידי אחיזת החלק תחילה באמצעות האצבעות שלנו, ובכך לנסות ולהבין כיצד מתחלק העומס, מה נחשב אחיזה יציבה, בטוחה וכו'.

2. כוח אחיזה
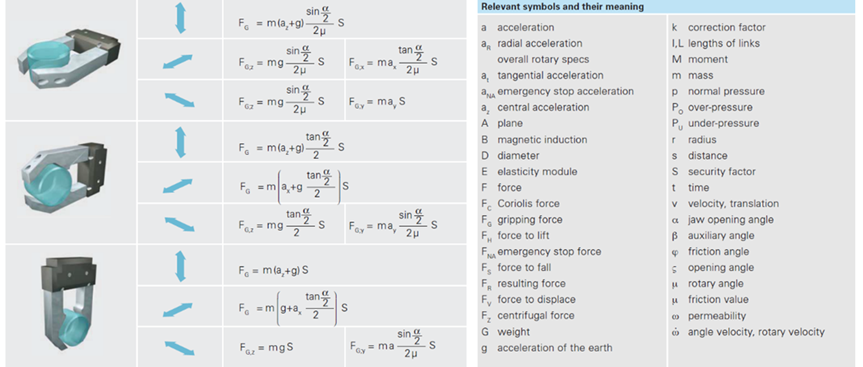
אחד הגורמים שכדאי לקחת בחשבון בבחינת גריפר מתאים, זה האם הוא מסוגל לייצר כוח אחיזה מספיק על מנת שלא להפיל את האובייקט בעת תנועת הרובוט, אך מצד שני, לא כוח אחיזה מופרז מידי אשר ימעך ויפגע בחלק עצמו.
חישוב כוח ההידוק חייב להתחשב בפרמטרים רבים כגון משקל החלק ומיקום מרכז הכובד שלו, פרופיל התנועה של הרובוט, חיכוך פני השטח, צורת הדפינה, כמות התפסניות ועוד.
למזלנו, לא צריך להמציא את הגלגל מחדש וניתן היום למצוא נוסחאות מוכנות כמעט לכל סוג של גריפר ואופן אחיזה דרוש.
3. דיוק ומהירות
יישומים רובוטים רבים דורשים עבודה במהירה ובדיוק גבוה. חשוב לזכור שדיוק כלל האפליקציה, מושפעת ממכלול הרכיבים והמערכות שבאות לידי ביטוי ביישום עצמו, ולא רק מהיכולות של הרובוט, ולכן פעמים רבות, חשוב יותר לבחון את החזרתיות הדרושה מהגריפר, אשר יבטיחו אחיזה עקבית בחלק.
כשמדברים על מהירות, לא מספיק לבחון רק את מהירות הרובוט, אלא צריך לבחון את זמן המחזור כולו, אשר מושפע באופן ישיר ממהירות האחיזה. כך לדוגמא, גריפר מגנטי יפעיל כוח אחיזה כמעט באופן מידי, אך מצד שני נתקשה לוודא שהחלק יוחזק בהדירות גבוה. מצד שני גריפרים הדורשים לחץ יכולים להיות איטיים יותר בגלל הפסדים שונים במערכת.
אחיזה בטוחה, חזרתית ומהירה בחלק, יאפשרו לבצע אופטימיזציה בתנועות הרובוט ובכך לייעל את התהליך העבודה ולשפר את התפוקה המתקבלת.
4. תנאי סביבה
לא בכל סוגי הגריפרים ניתן להשתמש בכל תהליך. בתעשיית המזון והתרופות למשל, גריפרים הידראוליים אסורים מאחר וקיים סיכון של דליפת נפט וזיהום. בתעשיות אחרות, בהם עובדים עם חדרים נקיים, לא מומלץ לתפוס את החלק עם ואקום או גריפרים פנאומטיים, מכיוון שהם יכולים ליצור זרימה של חלקיקים באוויר. בנוסף, גריפרים המשמשים לסביבות פחות נקיות כמו יציקה, עיבוד שבבי וריתוך חשופים ללכלוך ולחלקיקים ולכן עליהם להיות מוגנים ובעלי רמת אטימות IP מתאימה.
בנוסף, במידה ונרצה להשתמש בגריפר פנאומטי למשל, חשוב לוודא שאכן יש לנו נקודת אוויר זמינה בקרבת אזור העבודה.
5. עלות
בסופו של יום, גם אם הצלחנו למצוא פתרון שעונה על כל הדרישות הטכניות של מחלקת ההנדסה, אם הוא לא יתכנס לתקציב הלקוח, הוא פשוט לא יהיה חלק מהפרויקט.
חברת Robotiq לדוגמא, מספקת גריפר חשמלי ייחודי המאפשר לגריפר להתאים את עצמו לצורת החלק ובכך מספקת גמישות מרבית והיכולת להשתמש באותו גריפר למספר יישומים, תוך שליטה מלאה על המהלך, מהירות והכוח המופעל. פתרון שכזה עוזר להקטין את ה ROI שכן הוא מאפשר להשתמש באותו גריפר למספר יישומים וחלקים.

בנוסף, מלבד מחיר הגריפר עצמו יש לקחת בחשבון את עלות האביזרים הנלווים, כגון התפסניות, צינורות ומערכות שירות אוויר במידה ומדובר בפתרון פנאומטי, לצד מחליפי כלים (Tool Changer), אשר יכולים להקל על חיבור הגריפר לקצה הרובוט ולאפשר החלפת כלים מהירה באופן אוטומטי או ידני.
לסיכום,
ככל שהגריפר ידאג לספק אחיזה מלאה, בטוחה ונכונה לחלק, כך תגדילו את הסיכויים שהטמעת האפלקיציה בשטח תעבור בצורה חלקה יותר ותעבוד לאורך זמן ללא תקלות. לשם כך, חשוב להתאים את סוג הגריפר לחלק בצורה המיטבית אשר יספק הידוק וחזרתיות מרביים. במידה ולא ניתן להתבסס על מוצר קיים צריך לשקול לוותר על דרישות מסויימות או לבחון ולתכנן פתרון מותאם אישית. מכיוון שקשה להעביר תורה שלמה בכמה שורות בודדות, אשמח תמיד לייעץ ולספק מיידע רלוונטי.
כמו כן, לכל מי שרוצה להתעמק יותר בנושא, ממליץ בחום לקרוא את הספר Grippers in Motion מאת Andreas Wolf. ניתן לפנות אליי לכל שאלה או התייעצות: haim@su-pad.com